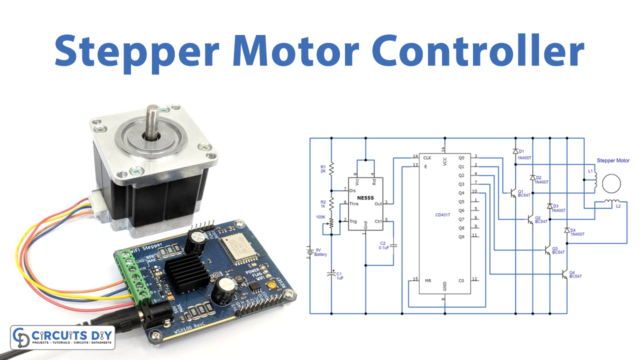
Here in this project, we are making a servo motor tester circuit. Servo motors are simply rotary actuators, enabling accurate control in various embedded device applications of angular orientation, acceleration, and velocity. The servo motors usually have 90-180 degree turns, and servo motors are designed to detect and control the angular orientation.
They are used where the exact movement or location of the shaft is required. It is not for high-speed applications but for applications at low speeds, medium torque, and precise position. These motors are used primarily in robotics, flight control, and control devices.

Hardware Component
The following components are required to make Servo Motor Tester Circuit
| S.no | Component | Value | Qty |
|---|---|---|---|
| 1. | Power supply | +9v to +12v | 1 |
| 2. | Servo motor | – | 1 |
| 3. | IC | NE555 timer | 1 |
| 4. | Resistor | 10KΩ, 33KΩ, 68KΩ, 220Ω | 2, 1, 1, 1 |
| 5. | Transistor | 2N2222 | 1 |
| 6. | Capacitor | 100nF | 1 |
| 7. | Push Button | – | 2 |
NE555 Pinout
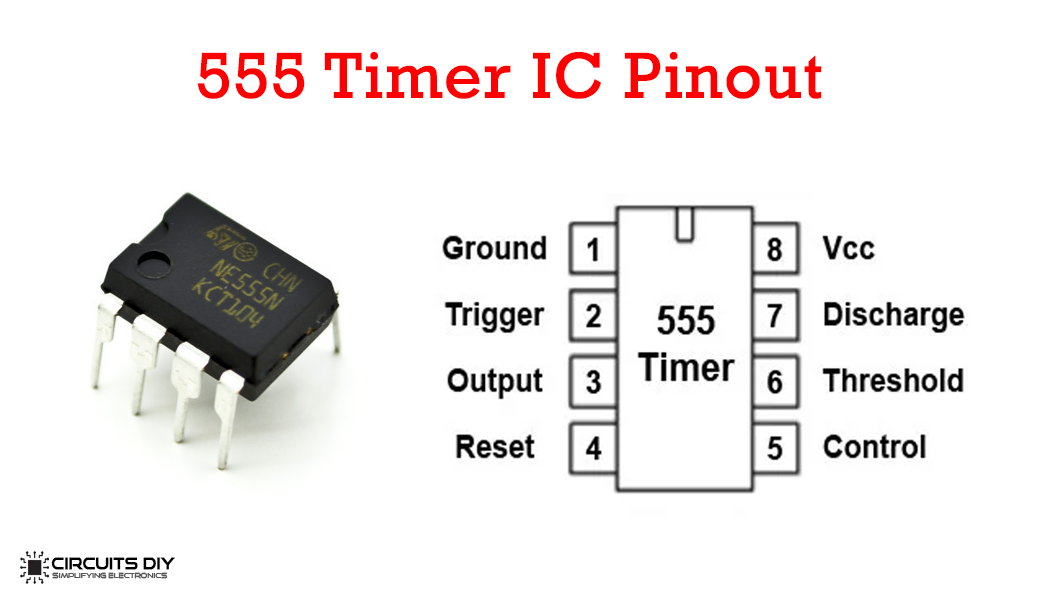
For a detailed description of pinout, dimension features, and specifications download the datasheet of 555 Timer
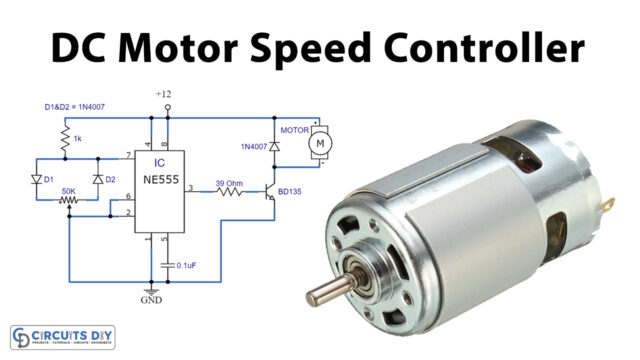
Servo Motor Tester Circuit
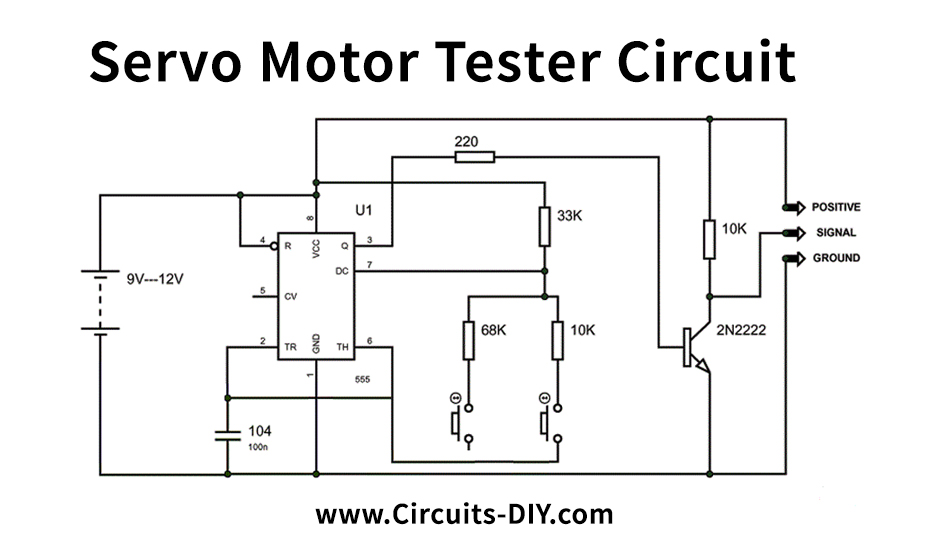
Working Explanation
The diagram above shows a servo test circuit. Now that we thought about moving the servo shaft left. We must set the 1/18 turn ratio and send PWM with a duty ratio of 2/18 to rotate to the left. Now, the turning on and off times of the output square wave is shown for a 555 astable vibrator, as seen below,
TH=0.693*(RA+RB)*C is given as high-level logic time.
TL= 0.693*RB*C is given as Low-Level logic time
If you look at the circuit diagram above, it will be obvious that we will change RB to have a different TL and TH. When pressing Button1, we will get a task ratio of less than 1/18, so it will go to the left if we feed it to the servo motor.
Applications and Uses
They are used where the exact movement or location of the shaft is required. It is not for high-speed applications but applications at low speeds, medium torque, and specific locations. These motors are used primarily in robotics, flight control, and control devices.