Introduction
Motors are more widely used in electronics; whether it’s a DC motor, a servo motor, or a stepper motor, industries cannot function without them. These motors are employed in consumer and robotics applications, in addition to industrial machinery. So we’ve opted to talk about a stepper motor, which is one of those motors. So, in this tutorial, we are going to interface ” Stepper Motor with Arduino UNO”.
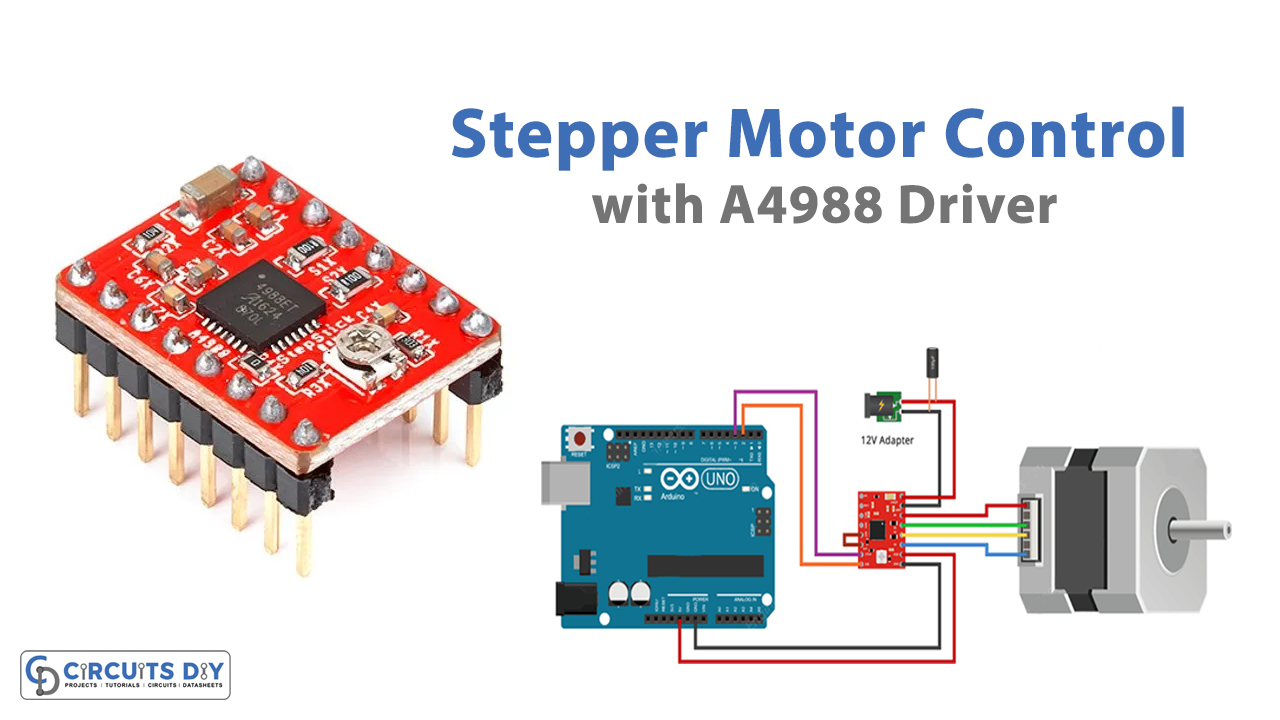
The name “stepper motor” comes from the fact that each electrical pulse causes the motor to advance one step. A pulsed electrical current is turned into an accurate one-step motion in the stepper motor, which is controlled by a stepper motor driver. Thus, stepper motors are controlled by a driver, which sends pulses into the motor, causing it to rotate. And, for this article, we are using the A4988 Driver Module.
A4988 Driver Module
The A4988 driver module has a built-in translator, and, because of this translator, just two wires are needed to connect it to the controller board. The maximum output capacity of the driver is 35 V and 2 A. It has full-, half-, quarter-, eighth-, and sixteenth-step modes for bipolar stepper motors.
A4988 Driver Module Pinout
| Pin Name | Description |
| VDD & GND | Connected to 5V and GND of Controller |
| VMOT & GND | Used to power the motor |
| 1A, 1B, 2A, 2B | Connected to the 4 coils of the motor |
| DIRECTION | Motor Direction Control pin |
| STEP | Steps Control Pin |
| MS1, MS2, MS3 | Microstep Selection Pins |
| SLEEP | Pins For Controlling Power States |
| RESET | |
| ENABLE |

Hardware Required
| S.no | Component | Value | Qty |
|---|---|---|---|
| 1. | Arduino UNO | – | 1 |
| 2. | USB Cable Type A to B | – | 1 |
| 3. | Jumper Wires | – | – |
| 4. | Driver Module | A4988 | 1 |
| 5. | Stepper Motor | – | 1 |
| 6. | Adapter | 12v | 1 |
| 7. | Capacitor | 100uF | 1 |
Circuit Diagram

Connection Table
| Arduino | Relay Module |
|---|---|
| VCC | VCC |
| GND | GND |
| D2 | DIR |
| D3 | STEP |
Arduino Code
// Define pin connections & motor's steps per revolution
const int dirPin = 2;
const int stepPin = 3;
const int stepsPerRevolution = 200;
void setup()
{
// Declare pins as Outputs
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop()
{
// Set motor direction clockwise
digitalWrite(dirPin, HIGH);
// Spin motor slowly
for(int x = 0; x < stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000); // Wait a second
// Set motor direction counterclockwise
digitalWrite(dirPin, LOW);
// Spin motor quickly
for(int x = 0; x < stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000); // Wait a second
}Working Explanation
Connect the circuit according to the circuit diagram or the connection table to control the stepper motor with Arduino UNO. Then, using the Arduino IDE, write the above-mentioned code and upload it to the Arduino UNO. Now you will watch the motors rotate in accordance with your code. Since the code is for a clockwise direction, therefore, you will observe the clockwise rotation.
Code Explanation
- We first defined the Arduino pins that are connected to the A4988’s pins. Then, we defined the content stepsPerRevolution which holds the integer number of steps that the motor would take to complete per revolution.
- In void setup, we declared the control pins of the motor as output.
- In a void loop, we set the DIR pin high to rotate the motor in a clockwise direction (to rotate the motor anti-clockwise you can set DIR low). Since the frequency of the pulses we send to the STEP pin determines the speed of a motor, therefore we set that pin to High, and then Low. The motor operates faster when the pulses are higher.
Applications and Uses
Stepper motors have greater use in different industries, and therefore this circuit can be utilized at so many trades. For example:
- In robotics, to convert electrical pulse into angular movements, or steps.
- Pulling filament into the extruder in a 3D printer.
- In CNC machines, to transform nonlinear input into linear movement.